Improving Model Drift for Robust Object Tracking
3Sun Yat-sen University 4Shandong University of Technology


Abstract
Discriminative correlation filters show excellent performance in object tracking. However, in complex scenes, the apparent characteristics of the tracked target are variable, which makes it easy to pollute the model and cause the model drift. In this paper, considering that the secondary peak has a greater impact on the model update, we propose a method for detecting the primary and secondary peaks of the response map. Secondly, a novel confidence function which uses the adaptive update discriminant mechanism is proposed, which yield good robustness. Thirdly, we propose a robust tracker with correlation filters, which uses hand-crafted features and can improve model drift in complex scenes. Finally, in order to cope with the current trackers’ multi-feature response merge, we propose a simple exponential adaptive merge approach. Extensive experiments are performed on OTB2013, OTB100 and TC128 datasets. Our approach performs superiorly against several state-of-the-art trackers while runs at speed in real time.
Introduction
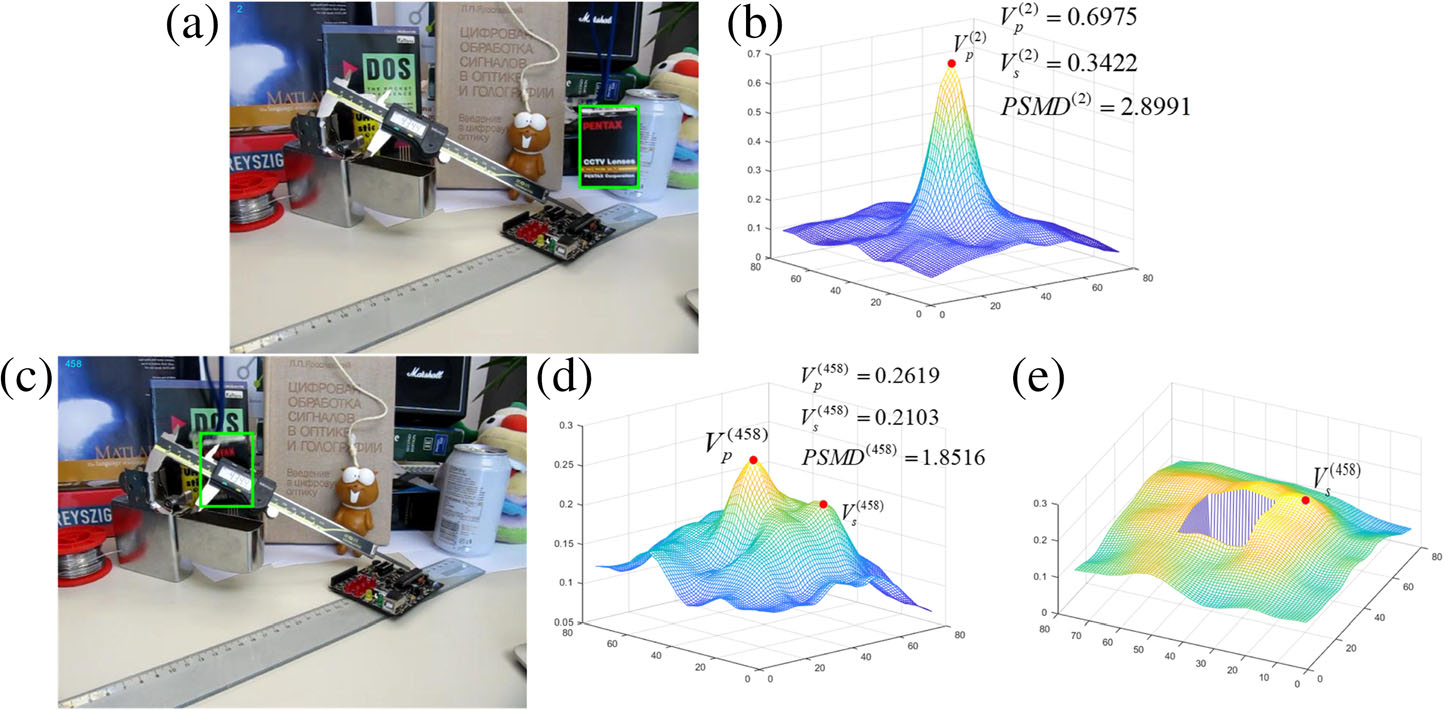
Response map of different scenes.
We proposed a novel method for detecting the primary and secondary peaks of the characteristic response map. In the ideal case, the CF tracker obtained has only one peak in the time domain response, as visualized in figure(b). However, in the complex scenes of OCC, SV, IV and etc., the time domain response maps are introduced unwanted multi-peak (see figure(d)).
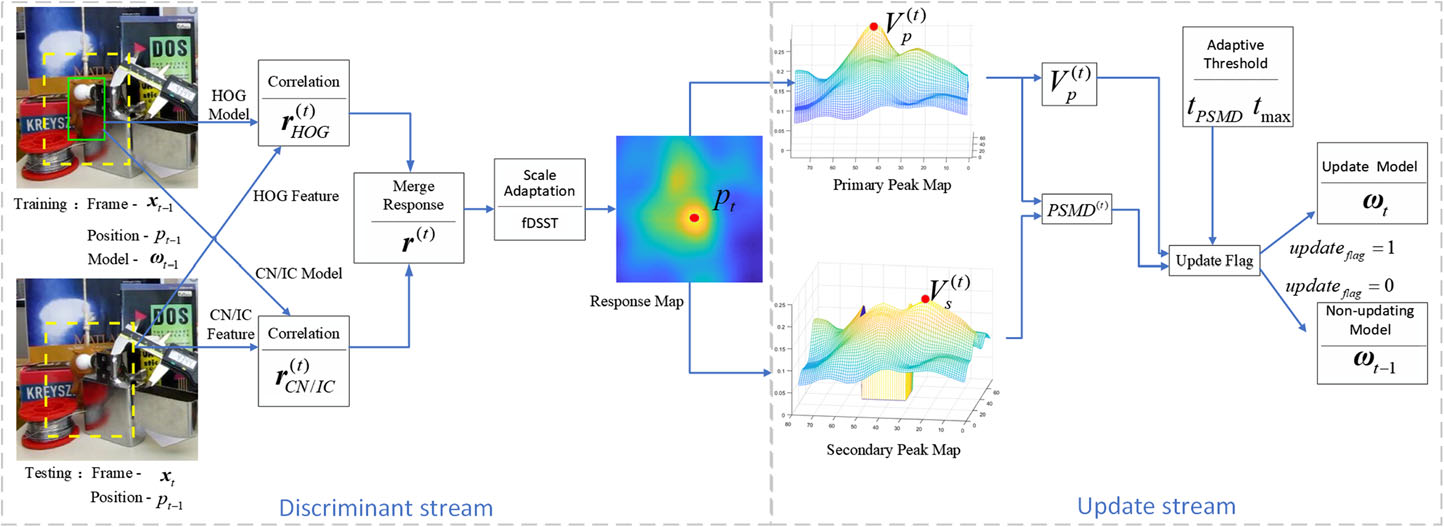
Pipeline of MDRCF.
The whole model contains two streams: Discriminant stream and update stream. The tracker extracts the HOG feature and CN feature of the t−1 frame image and the t frame image, and performs correlation matching. Using the multi-feature fusion mechanism to perform feature fusion on the two features, and then we use the fast discriminative scale space tracking which introduced by fDSST to solve the problem of scale changes in the tracking process.
Results

Qualitative comparison of ECO-HC and MDRCF on 8 sequences. Red is MDRCF, green is ECO-HC.
Citation
@article{dong2020MDRCF,
author={Dong, Qiujie and He, Xuedong and Ge, Haiyan and Liu, Qin and Han, Aifu and Zhou, Shengzong},
title={Improving model drift for robust object tracking},
journal={Multimedia Tools and Applications},
year={2020},
volume={79},
number={35},
pages={25801-25815},
issn={1573-7721},
doi={10.1007/s11042-020-09032-z},
url={https://doi.org/10.1007/s11042-020-09032-z}
}
This page is maintained by Qiujie Dong.